Управление параллельным портом ПК для домашней автоматизации
Введение
Одна из самых наглядных и практичных областей применения управления периферийными портами ПК — домашняя автоматизация. Эта дисциплина объединяет электронную инженерию, программирование и социотехническое проектирование: цель — повысить комфорт, безопасность и коммуникацию в доме с помощью автоматизации простых и повторяющихся задач.
С одной стороны, простые примеры (включение/выключение лампы) кажутся тривиальными. С другой — работа с реальными устройствами затрагивает электрические, электронные и программные аспекты, а также требования по безопасности и совместной работе с людьми.
Важно: в статье рассмотрены аппаратные и программные подходы для образовательных и экспериментальных целей. Любые действия с аппаратурой выполняйте осторожно и под свою ответственность.
К чему это подходит
- Прототипирование простых устройств управления (лампы, индикаторы, моторы с низким током).
- Обучение встроенным интерфейсам и цифровым шинам данных.
- Эксперименты с последовательностями и таймингом на реальном железе.
К чему это не подходит
- Непосредленное управление высокомощными нагрузками без внешних драйверов.
- Промышленные или сертифицированные системы безопасности без дополнительных защит.
Определения в одном предложении
- Параллельный порт: интерфейс DB-25, по которому передаётся байт данных одновременно по 8 линиям.
- Веб-интерфейс: интерфейс управления устройством через браузер.
- Домашняя автоматизация: автоматизация систем дома для управления энергией, безопасностью и комфортом.
Параллельный порт (Centronics/DB-25) передаёт данные по 8-битной шине. Помимо данных, используются линии статуса и управления. Основные характеристики электрических сигналов порта:
- Высокий уровень напряжения: 3.3–5 В.
- Низкий уровень: 0 В.
- Максимальный ток на выходе (уровень TTL/возрастные реализации): порядка нескольких миллиампер; в документации часто указываются пределы в миллиамперах.
- Для управления реальными нагрузками требуются буферы или драйверы.
Линии данных можно использовать для управления светодиодами, транзисторами, реле и пр., но обязательно с ограничением тока и учётом уровня питания.
Адреса портов
Стандартный параллельный порт использует три смежных адреса. Часто встречающиеся базовые адреса:
| 3BCh | 3BDh | 3BEh |
| 378h | 379h | 37Ah |
| 278h | 279h | 27Ah |
- Первый адрес диапазона — базовый адрес (Data register).
- Второй — регистр Status.
- Третий — регистр Control.
Расширенные режимы (EPP, ECP) резервируют дополнительные адреса и, в случае ECP, могут использовать DMA.
DMA и расширенные режимы
ECP-режим может использовать DMA (Direct Memory Access) для ускорения передачи данных, освобождая процессор. Для включения DMA у порта должен быть назначен канал (обычно в диапазоне 0–3). Для большинства учебных примеров и простых подключений DMA не требуется.
Доступ к портам ввода-вывода осуществляется ядром Linux. Для прямого управления портом из пользовательской программы на C используются заголовки и функции низкоуровневого ввода-вывода. Требуются права root или соответствующие привилегии для ioperm/iopl.
Необходимые заголовки (пример):
#include
#include
#include
#include Краткие пояснения:
- stdio.h — стандартный ввод/вывод (fprintf и пр.).
- stdlib.h — общие функции (exit и пр.).
- unistd.h — POSIX-функции (sleep, usleep и пр.).
- sys/io.h — низкоуровневые inb/outb/ioperm.
Для типового первого порта используют базовый адрес 0x378:
#define base 0x378 /* parallel port base address */Если этот адрес недоступен, часто пробуют 0x278.
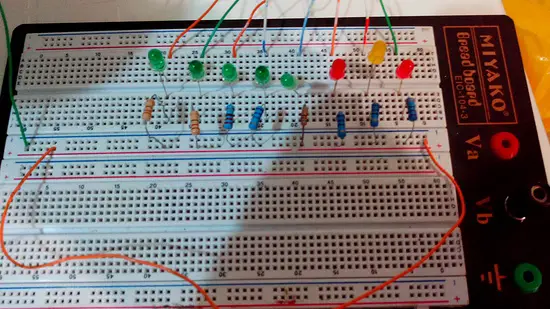
В примере мы подключаем до 8 светодиодов к линиям данных порта через ограничивающие резисторы. Типичные рекомендации:
- Ток через светодиод: 5–20 мА (для индикаторных целей достаточно 5–15 мА).
- Напряжение питания порта: 5 В (в зависимости от реализации).
- Для расчёта резистора используйте закон Ома: R = (Vcc − Vf) / I, где Vf — прямое падение светодиода (обычно 1.8–3.3 В в зависимости от цвета), I — желаемый ток.
Пример: при Vcc = 5 В, Vf = 2 В, I = 10 мА: R = (5 − 2) / 0.01 = 300 Ом.
Важно: параллельный порт не предназначен для питания мощных нагрузок. Для управления реле или мотором используйте драйверы, транзисторы или специализированные буферные микросхемы.
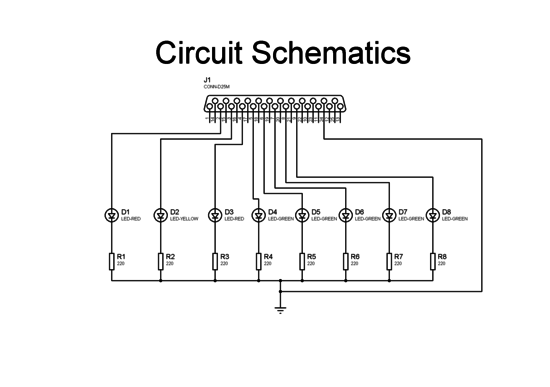
Схема подключения (общее пояснение)
На выводах DATA0..DATA7 через резисторы подключены светодиоды на землю. Правильное подключение и полярность обязательны.
Примечание: цвет светодиодов не существенен.
Вставляйте и извлекайте разъёмы только при выключенном компьютере, чтобы избежать повреждений контроллера и материнской платы.
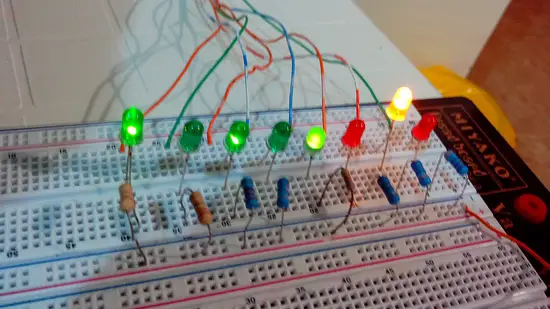
Ниже — полный пример программы, который поочерёдно включает биты DATA0..DATA7 с интервалом 1 секунда. Программа демонстрационная — для экспериментов на оборудовании.
#include
#include
#include
#include
#define BASE 0x378 /* адрес порта */
int main(void) {
unsigned char val;
int i;
/* Запрос прав доступа к порту */
if (ioperm(BASE, 1, 1)) {
fprintf(stderr, "Access denied to %x\n", BASE);
exit(1);
}
/* Цикл: включаем по очереди биты DATA0..DATA7 */
for (i = 0; i < 8; i++) {
val = (1 << i); /* 1,2,4,8,... */
outb(val, BASE);
sleep(1); /* 1 секунда */
}
/* Очистка: выключаем все линии */
outb(0x00, BASE);
/* Освобождение прав */
ioperm(BASE, 1, 0);
return 0;
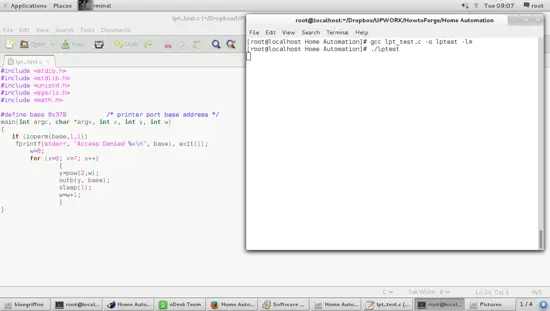
} Компиляция и запуск (пример):
- Компиляция: gcc -o parport_blink parport_blink.c
- Запуск: sudo ./parport_blink
Пояснения к коду:
- ioperm(BASE, 1, 1) — разрешение доступа к одному байту по адресу BASE (нужны права root).
- outb(value, BASE) — запись байта value в порт.
- (1 << i) — формирование маски для включения одного бита.
- После работы важно сбросить значения и вернуть права (ioperm(BASE,1,0)).
Для управляющих задач с низкими требованиями по быстродействию достаточно sleep() или usleep(). Для точного формирования широтно-импульсной модуляции (ШИМ) или быстрых последовательностей директ-манипуляция портом на уровне пользователя может быть ненадёжной — лучше реализовать низкоуровневую логику в модуле ядра или использовать аппаратные таймеры.
- Без мультиплексирования вы получаете до 8 независимых дискретных выходов.
- Сдвиговые регистры (например, 74HC595) позволяют расширить количество выходов, при этом для управления потребуется несколько управляющих линий (данные, такт, защёлка).
- Мультиплексирование и демультиплексирование позволяют управлять большим числом индикаторов при меньшем числе проводов, но требуют управления временем и программной логики.
- Для силовых нагрузок используйте драйверы (например, ULN2003/ULN2803) или реле с внешним питанием и диодной защитой.
Пример использования 74HC595
Ментальная модель: параллельный порт отдаёт последовательность битов в регистр сдвига; по подаче тактового импульса данные сдвигаются, затем защёлка копирует их на выходы. Это даёт N выходов при использовании всего 3 проводов (DATA, CLK, LATCH).
- Транзисторные сборки (NPN/PNP или N-канальные MOSFET) используются для коммутации нагрузок выше возможностей порта.
- Серийные драйверы/микросхемы (ULN2003/ULN2803) содержат набор транзисторов с встроенными резисторами баз/затворов и диодами защиты и хорошо подходят для индикации, реле и низковольтных моторов.
- Оптопары полезны для гальванической развязки между портом и управляющими цепями, повышая безопасность.
- Перед подключением/отключением всегда выключайте питание.
- Соблюдайте полярность и общую массу (GND).
- Для защиты от перенапряжений используйте диоды и предохранители.
- При работе на открытой плате используйте заземление и антистатические меры.
Критерии приёмки
- Программа корректно запрашивает и освобождает доступ к порту.
- При запуске последовательность светодиодов соответствует ожидаемой (включается по одному биту с заданным интервалом).
- Нагрузки не превышают допустимого тока и не нагреваются заметно при длительной работе.
- Соединения надёжны — отсутствие искрения или запахов.
Тестовые сценарии
- Запустить программу с root-права и убедиться, что светодиоды загораются последовательно.
- Проверить, что после завершения все линии сброшены в 0.
- Подключить нагрузку через драйвер (ULN2003) и проверить переключение.
- Проверить поведение при неправильном адресе (например, BASE=0x278) — программа должна корректно сообщать об ошибке доступа.
- “Access denied”: программа не запущена от root — используйте sudo или проверьте права.
- Неправильный адрес порта: попробуйте 0x378, 0x278, 0x3BC.
- Слабый/неяркий светодиод: уменьшите сопротивление или проверьте контакт; не превышайте допустимый ток порта.
- Непредсказуемое поведение: возможна конфликтующая программа/драйвер (например, принтер использует порт) — отключите конфликтующие службы.
Если у вас нет параллельного порта или требуется более современный подход, рассмотрите:
- Raspberry Pi / Arduino: предоставляют GPIO и простую интеграцию с веб-интерфейсом.
- USB–GPIO адаптеры: удобны, но у них иной программный интерфейс.
- Специализированные контроллеры (PLC) для промышленного применения.
Миграционные советы
- При переходе с параллельного порта на MCU переносятся лишь логические паттерны управления; физический уровень и защита должны быть пересчитаны.
- При использовании USB-адаптеров учитывайте задержки и буферизацию USB.
- Выключите ПК перед подключением проводки.
- Используйте ограничительные резисторы на светодиодах.
- Для реле и моторов используйте отдельное питание и драйверы.
- Защитите входы порта оптронной развязкой при необходимости.
- Проверьте каждую ветку цепи на короткое замыкание перед включением питания.
Инженер аппаратной части
- Проверить электрические характеристики порта.
- Подобрать буфер/драйвер для каждой нагрузки.
- Рассчитать резисторы и защитные элементы.
Программист
- Реализовать корректный вызов ioperm/iopl.
- Обработать ошибки доступа.
- Обеспечить корректное обнуление портов при завершении.
Оператор/пользователь
- Следовать инструкциям по подключению и безопасности.
- Не перегружать выходы.
- “Разделяй области ответственности”: логика управления — в ПО, силовая коммутация — в железе.
- “Защищай слабое звено”: порт — слабое звено, поэтому всегда ставьте буфер/драйвер при любой нагрузке свыше пары мА.
- “Идентифицируй первопричину”: если поведение непредсказуемо, проверьте электрические связи прежде чем пытаться исправить код.
- Если нужно много цифровых выходов — используйте сдвиговые регистры или внешний микроконтроллер.
- Если нужен удалённый доступ и масштабируемость — внедрите MQTT/HTTP-сервис на микроконтроллере и используйте веб-интерфейс.
- Для высокоточных временных интервалов — переместите критическую логику в прошивку MCU или модуль ядра Linux.
- ioperm(addr, len, turn_on) — разрешает доступ к портам
- outb(value, port) — запись байта
- inb(port) — чтение байта
- gcc -o program program.c — компиляция
- sudo ./program — запуск с правами
- 74HC595 — сдвиговый регистр для расширения выходов.
- ULN2003/ULN2803 — набор драйверных транзисторов с защитой для подключения реле/соленоидов.
- Оптронные развязки — для гальванической развязки и защиты контроллера.
- Сервис на ПК может предоставлять HTTP API, который запускает локальную программу для записи в порт.
- Для безопасности ограничьте доступ API локальной сетью и применяйте аутентификацию.
- Для реагирования в реальном времени используйте WebSocket или long polling.
- Если требуется сертификация электробезопасности.
- Если нужна высокая нагрузочная способность без внешней электроники.
- Если нужен масштабируемый, удалённый и отказоустойчивый контроллер — лучше выбирать специализированные решения.
- Определите нагрузку (ток/напряжение/тип).
- Разработайте схему с учётом защиты и буферов.
- Напишите минимальную программу для проверки базовой логики.
- Проведите тесты на отдельных каналах.
- Интегрируйте в систему мониторинга или веб-интерфейс.
- Все выходы стабильно переключаются в тестовых сценариях.
- Нагрузки не превышают допустимые величины без внешних буферов.
- Система корректно обрабатывает ошибочные состояния (потеря прав, конфликт адресов).
Параллельный порт остаётся удобным инструментом для прототипирования и обучения: он прост, нагляден и позволяет быстро получить результат. Для реальных проектов с требованиями по надёжности и мощности следует использовать внешние драйвера и современные контроллеры. В следующих шагах можно:
- Реализовать расширение через 74HC595.
- Добавить защиту через оптопары и драйверы ULN.
- Создать простой локальный HTTP-сервис для удалённого управления.
Литература и ресурсы
- Martin H, Saez F. Domotica, Un Enfoque Sociotécnico. 2006.
- Axelson J. Parallel Port Complete. Programming, Interfacing, & Using the PC’s Parallel Printer Port.
- Kerrisk M. The Linux Programming Interface.
Похожие материалы

Несколько аккаунтов Skype: Multi Skype Launcher

Журнал для работы: повысить продуктивность

Персональные звуки уведомлений на Android

Скачивание шоу Hulu для офлайн‑просмотра

Microsoft Start: персонализированная новостная лента
