Управление сервоприводом через Processing и контроллер Xbox360 с Arduino

Краткое описание и зачем это нужно
Этот пошаговый гид показывает, как управлять одним сервоприводом, подключённым к Arduino Uno, используя Processing и проводной контроллер Xbox360. Подход полезен для прототипов, роботов-игрушек, учебных проектов и интерфейсов управления внешними устройствами. Мы объясним не только базовую реализацию, но и как отладить соединение, настроить «мертвую зону» джойстика, сглаживание сигналов и расширения на несколько сервоприводов.
Определение: Firmata — протокол, позволяющий управлять пинами Arduino через последовательный порт из внешних программ (например, Processing).
Что понадобится
- 1 × Arduino (в примере Arduino Uno).
- 1 × аналоговый hobby-сервопривод (совместимый с 5 В). Обычно работает с PWM-сигналом и занимает один цифровой пин.
- 1 × проводной контроллер Xbox360 (USB). Подойдёт и большинство USB-геймпадов, но конфигурация интерфейса может отличаться.
- Несколько проводов-перемычек для соединений (m-m или m-f в зависимости от сервопривода).
- Компьютер с USB-портом.
- Установленные: Arduino IDE и Processing (скачать с официальных сайтов).
Важно: если у вас беспроводной контроллер, потребуется приёмник USB или адаптер — далее описаны отличия в разделе «Альтернативы». Также убедитесь, что питание Arduino обеспечивает ток, достаточный для сервопривода — мощные сервы требуют отдельного источника питания.
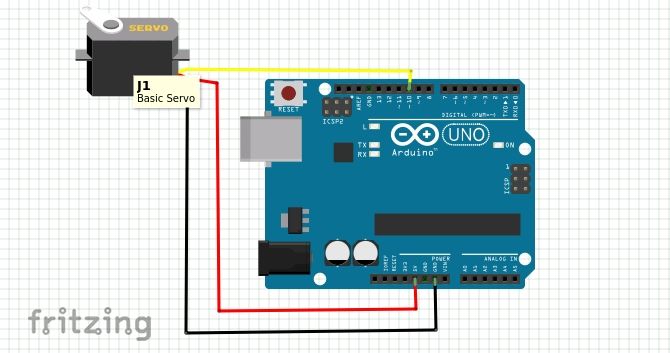
Подготовка Arduino и подключение серво

- Подключите питание серво: обычно красный провод — к 5V, чёрный или коричневый — к GND.
- Сигнальный провод (обычно жёлтый/оранжевый) подключите к цифровому пину 10 (в примере).
- Проверьте надёжность соединений и отсутствие коротких замыканий.
- Подключите Arduino к компьютеру через USB и откройте Arduino IDE.
Совет: если ваш сервопривод потребляет значительный ток (>500 mA при нагрузке), используйте отдельный 5–6 В источник питания с общей землёй (GND) с Arduino.
Установка StandardFirmata на плату
- В Arduino IDE откройте File > Examples > Firmata > StandardFirmata.
- Загрузите этот скетч на плату (Upload).
- Если загрузка не проходит — проверьте Tools > Board и Tools > Port, выбрав правильную плату и COM-порт.
Важно: StandardFirmata оставляет Arduino в режиме приёма команд по последовательному порту; после этого вы будете управлять платой извне (через Processing и библиотеку Firmata).
Подготовка Processing и установка библиотек
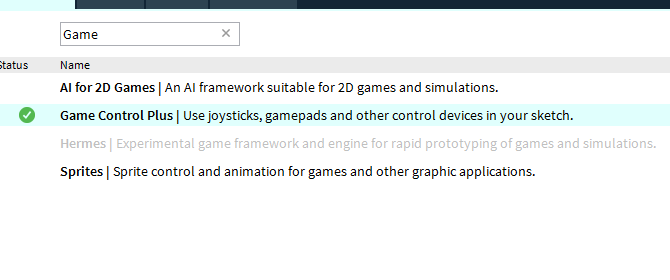
Откройте Processing. Перед запуском скетча нужно установить три библиотеки через Sketch > Import Library > Add Library:
- Game Control Plus — для работы с геймпадами и конфигурации контроллера.
- G4P — графические элементы, нужен Game Control Plus для конфигуратора.
- Arduino (firmata) — интерфейс к Arduino через Firmata.
Установите их через поиск в Contribution Manager. Processing доступен для Windows, macOS, Linux и Raspberry Pi.
Тестирование Arduino + Processing (примерный sketch)
Перед тем как писать свой код, проверьте связь между Processing и Arduino.
- В Processing откройте File > Examples > Contributed Libraries > Arduino (firmata) > ArduinoServo.
- Найдите строку:
println(Arduino.list());Если она закомментирована, раскомментируйте, сохраните и запустите sketch (кнопка «Run»). В консоли появится список доступных последовательных портов (COM-портов).
- Определите индекс вашего порта; если Arduino, например, третий в списке, это индекс 2. Измените строку инициализации Arduino в скетче на нужный индекс:
arduino = new Arduino(this, Arduino.list()[2], 57600);- Измените настройки пинов в примере так, чтобы использовать пин 10:
//arduino.pinMode(4, Arduino.SERVO);
arduino.pinMode(10, Arduino.SERVO);и в draw():
arduino.servoWrite(10, constrain(mouseX / 2, 0, 180));
// arduino.servoWrite(4, constrain(180 - mouseX / 2, 0, 180));- Запустите. Перемещение мыши по окну должно перемещать сервопривод.
Советы по отладке:
- Если сервопривод не двигается, проверьте питание и соединения.
- Если Arduino не отображается в списке портов, убедитесь в драйверах (Windows) и правильном кабеле (некоторые USB-кабели — только для питания).
Конфигурация контроллера через Game Control Plus Configurator
Подключите контроллер и откройте пример Configurator (Sketches > Examples > GameControlPlus > Configurator). Запустите.
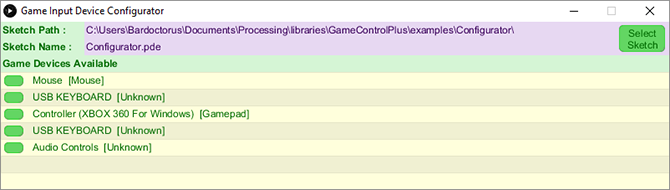
- Выберите ваше устройство в списке слева.
- Откроется окно крупнее с представлением осей и кнопок.
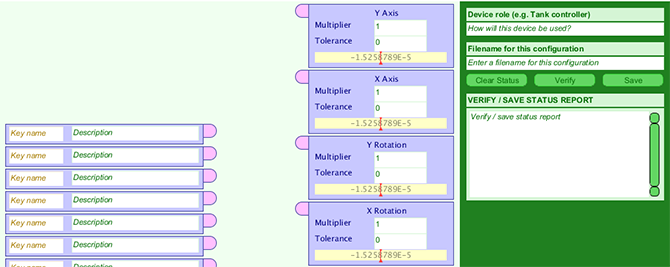
- На левой панели создайте новую переменную, например “servoPos” (имя будет использоваться в коде). В поле описания можно кратко описать назначение.
- Подвиньте правый аналоговый стик; найдите соответствующее поле (в нашем примере — X Rotation). Соедините его с переменной “servoPos”.
- В правом верхнем углу заполните Device role и Filename (например, xbs), затем нажмите Verify > Save. Это создаст файл конфигурации (data/xbs.props или аналогичный) в каталоге Configurator.
Файл конфигурации понадобится в вашем собственном скетче. Мы скопируем его далее.
Подготовка папки проекта Processing
- Создайте новый sketch в Processing и сохраните его под удобным именем — Processing создаст папку этого проекта в Documents/Processing/.
- Откройте папку Configurator: Documents/Processing/libraries/GameControlPlus/examples/Configurator и скопируйте папку data, которая содержит файл конфигурации, созданный ранее.
- Вставьте эту папку data в директорию вашего нового скетча. Теперь ваш скетч найдёт конфигурацию по имени файла.
Создание пользовательского скетча (полный код)
Ниже — упрощённый и улучшенный вариант кода из руководства, с комментариями и возможностью тонкой настройки. Проверьте индекс COM-порта в Arduino.list() и замените при необходимости.
import processing.serial.*;
import net.java.games.input.*;
import org.gamecontrolplus.*;
import org.gamecontrolplus.gui.*;
import cc.arduino.*;
import org.firmata.*;
ControlDevice cont;
ControlIO control;
Arduino arduino;
float thumb;
void setup() {
size(360, 200);
control = ControlIO.getInstance(this);
cont = control.getMatchedDevice("xbs");
if (cont == null) {
println("Контроллер не найден. Закрытие программы.");
System.exit(-1);
}
// Раскомментируйте println(Arduino.list()) при первой настройке
// чтобы увидеть доступные последовательные порты в консоли
// println(Arduino.list());
// Укажите нужный индекс в Arduino.list()[]
arduino = new Arduino(this, Arduino.list()[2], 57600);
arduino.pinMode(10, Arduino.SERVO);
}
public void getUserInput() {
// Считываем значение оси, смещаем диапазон от -1..1 к 0..180
thumb = map(cont.getSlider("servoPos").getValue(), -1, 1, 0, 180);
// Применяем базовую фильтрацию (мертвая зона и сглаживание можно добавить здесь)
}
void draw() {
getUserInput();
background((int)thumb, 100, 255);
arduino.servoWrite(10, (int)thumb);
} Комментарии и улучшения:
- Преобразование map(…, -1,1,0,180) переводит значения оси от -1..1 в угол 0..180° для серво.
- Если вы хотите инвертировать ось, можно заменить на map(…, 1, -1, 0, 180).
- Для предотвращения дребезга добавьте «мертвую зону» — игнорируйте изменения меньше заданного порога.
Частые проблемы и отладка
Сервопривод не двигается
- Проверьте питание сервопривода (настольный блок питания или батареи). Некоторые сервоприводы требуют больше тока, чем может дать USB-порт.
- Проверьте правильность пина (в коде должен быть тот же номер, что и в подключении).
Arduino не отображается в Arduino.list()
- На Windows установите драйверы CH340/FTDI, если у вас клон Arduino.
- Проверьте кабель — некоторые кабели только заряжают и не передают данные.
Контроллер не обнаружен в Configurator
- Для Xbox360 на Windows нужен драйвер Microsoft Xbox 360 Controller; на современных системах он обычно встроен.
- Если контроллер беспроводной — нужен USB-приёмник Xbox.
Нестабильное поведение оси
- Настройте deadzone в коде: если abs(value - центр) < порог — считывать как центр.
- Добавьте экспоненциальную чувствительность или кривую отклика, если требуется.
Расширения: полезные улучшения и альтернативы
- Несколько сервоприводов: создайте массив пинов и маппингов, считывайте разные управляющие переменные из конфигурации контроллера.
- Сглаживание: реализуйте экспоненциальное сглаживание (low-pass filter) для плавных поворотов:
float target = map(...);
float current = 0;
float alpha = 0.2; // 0..1, чем меньше — тем плавнее
current = current + alpha * (target - current);
arduino.servoWrite(pin, (int)current);- Калибровка: при старте отображайте значения осей в окне, чтобы записать центры и пределы.
- Использование беспроводных контроллеров: подключение через Bluetooth или приёмник — см. раздел «Альтернативы».
- Обработка ошибки связи: если Arduino не отвечает, пытаться переподключиться через заданный интервал.
Когда этот подход не подойдёт (ограничения)
- Высокоскоростные или точные приводы: Firmata и последовательный порт имеют задержку; для высокоточной синхронизации лучше писать скетч непосредственно на Arduino и посылать только короткие команды.
- Большое количество каналов PWM: при управлении десятками сервопр приводов лучше использовать специализированные драйверы (PCA9685).
Альтернативные подходы
- Прямой USB HID-контроллер: программировать Arduino как USB HID и принимать команды из контроллера напрямую.
- Использование Unity (если проект — игра/симуляция) и плагинов для работы с Arduino.
- Управление по сети (Wi‑Fi/Bluetooth) — полезно для удалённых роботов.
Ментальные модели и эвристики
- Разделяйте ответственность: Arduino — «низкоуровневый исполнитель» (двигает сервопривод), Processing — «высокоуровневый контролёр» (считывает ввод, логика, визуализация).
- Сначала проверьте каждый узел отдельно: серво + Arduino (локально), затем контроллер + Processing (локально), затем объединяйте.
- Думайте о задержках: последовательный порт и библиотеки добавляют миллисекунды задержки; при управлении несколькими сервоприводами добавьте буферизацию команд.
Критерии приёмки
- Arduino реагирует на команды из Processing и двигает сервопривод на ожидаемые углы при движении джойстика.
- Диапазон значений соответствует 0..180°; центр стика соответствует ~90° (в пределах допустимого дрейфа).
- Нет резких скачков или паразитных движений при неподвижном стике (при установленной мертвой зоне).
План действий / SOP (быстрая инструкция)
- Подключите серво к пину 10, питание и GND.
- Установите StandardFirmata на Arduino.
- Установите библиотеки Processing: Game Control Plus, G4P, Arduino (firmata).
- Запустите Configurator, создайте переменную servoPos и свяжите с осью джойстика, сохраните как xbs.
- Скопируйте папку data в папку скетча Processing.
- Настройте и запустите основной sketch; проверьте COM-порт и индекс Arduino.list().
- Отладьте питание и deadzone при необходимости.
Тестовые сценарии и критерии приёмки
- Тест 1: При движении правого стика вправо сервопривод поворачивается плавно к 180°. При движении влево — к 0°.
- Тест 2: При неподвижном стике серво остаётся в одном положении (нет вибрации).
- Тест 3: Переключение USB-кабеля на другой порт — Arduino.list() показывает новый порт; при обновлении индекса в коде связь восстанавливается.
Руководство действий при ошибках (runbook)
- Сервопривод не двигается:
- Проверить питание 5V и соединение GND.
- Убедиться, что пин настроен как SERVO.
- Попробовать другой пин и обновить код.
- Processing не видит Arduino:
- В консоли Processing раскомментировать println(Arduino.list()) и посмотреть список портов.
- Проверить драйверы и кабель.
- Контроллер не реагирует в Configurator:
- Проверить подключение, драйверы Xbox (Windows), попробовать другой USB-порт.
Примеры расширений и проекты для вдохновения
- Лазерная турель: используйте два сервопривода для горизонтали и вертикали, добавьте кнопки для стрельбы и питания лазера.
- Музыкальный интерфейс: подключите пьезо-буззер и меняйте тон в зависимости от положения стика.
- Телеметрия: добавьте датчики и отправляйте их показания в Processing для визуализации.
Советы по безопасности и электропитанию
- Никогда не питать мощный сервопривод напрямую от USB, если его ток может превысить 500–1000 mA.
- Объединяйте землю (GND) между Arduino и внешним источником питания.
- Проверяйте полярность и надежность соединений перед включением.
Локальные альтернативы и совместимость
- Если у вас нет Xbox360-контроллера, подойдёт любой USB-геймпад, распознаваемый в системе. Для Linux/Windows поддержка XInput/DInput может отличаться.
- Для Raspberry Pi используйте тот же подход с Processing (версия для Pi), но убедитесь в доступности драйверов для контроллера.
Шаблон контрольного списка перед демонстрацией
- Arduino загружен StandardFirmata.
- Сервопривод корректно подключён (5V, GND, сигнал на пине 10).
- Библиотеки Processing установлены (Game Control Plus, G4P, Arduino (firmata)).
- Конфигурационный файл контроллера (xbs) находится в папке data скетча.
- COM-порт указан правильно в коде (Arduino.list()[index]).
- Отладочная печать значений оси работает и центр стика корректируется.
Заключение
Этот проект демонстрирует компактный способ соединить мир физического устройства (Arduino + серво) с интерфейсом управления из Processing и игрового контроллера. С помощью Firmata вы избегаете частой перепрошивки Arduino и получаете быстрый цикл разработки. При необходимости переходите на более низкоуровневые реализации (скетчи на Arduino) для уменьшения задержки и повышения надёжности.
Важно: при разработке проектов с внешними источниками питания и силовыми сервоприводами всегда учитывайте электрическую безопасность и тестируйте систему на малых нагрузках.
Ключевые ссылки и ресурсы
- Официальный сайт Arduino — для IDE и драйверов.
- Processing.org — для загрузки и справки по библиотекам.
- Game Control Plus documentation — для тонкой настройки контроллера.
Дополнение: краткая проверка на совместимость драйверов и советы по использованию Bluetooth/беспроводных контроллеров приведены в разделе «Альтернативы».
Похожие материалы

Несколько аккаунтов Skype: Multi Skype Launcher

Журнал для работы: повысить продуктивность

Персональные звуки уведомлений на Android

Скачивание шоу Hulu для офлайн‑просмотра

Microsoft Start: персонализированная новостная лента
